
SETTING REMOTE CONTROL MODE
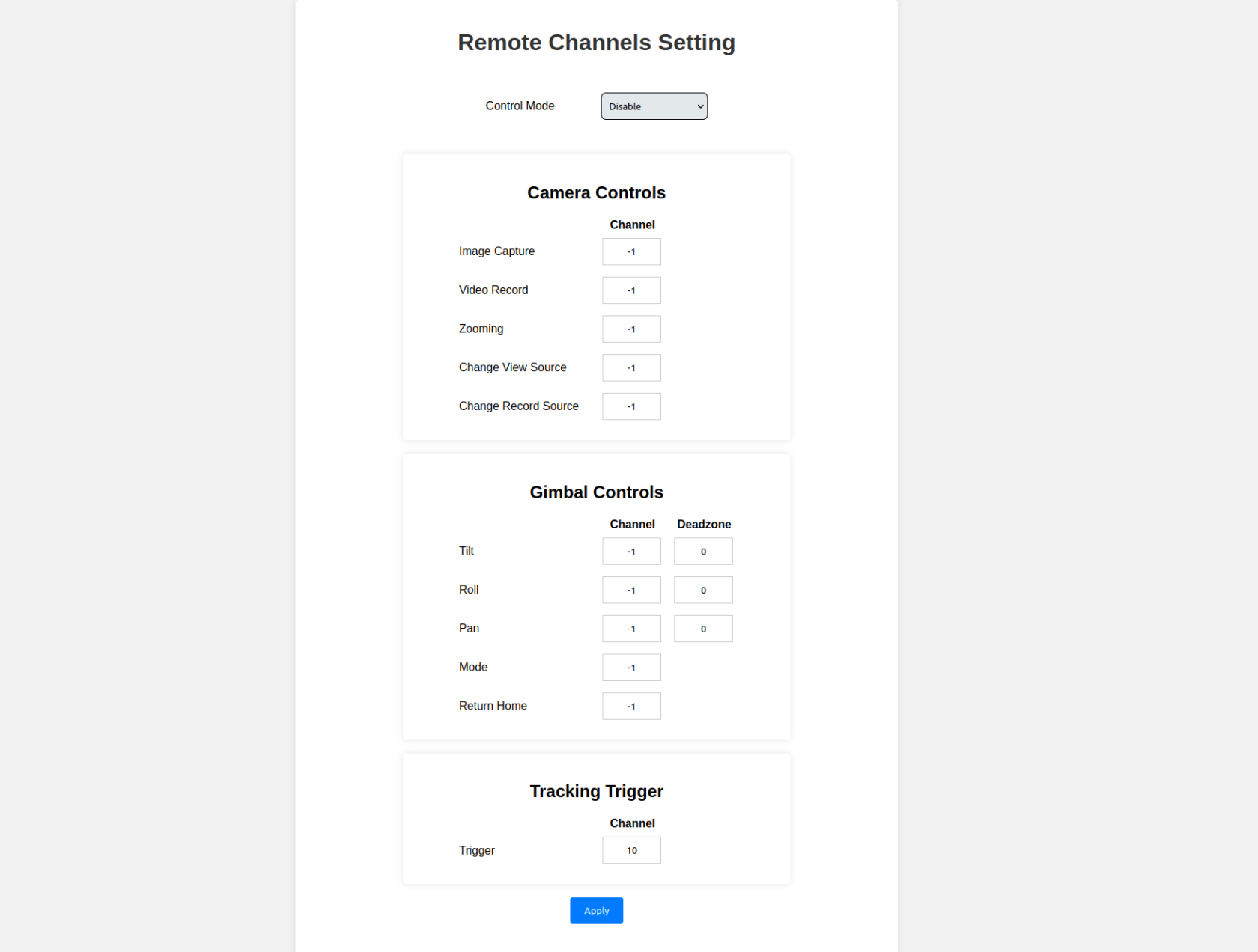
1. Setting Payload Default channels on the Webserver app

2. Setup Ardupilot param
2.1 Disable control by SBUS/PPM. Only use MAVlink to control the Payload
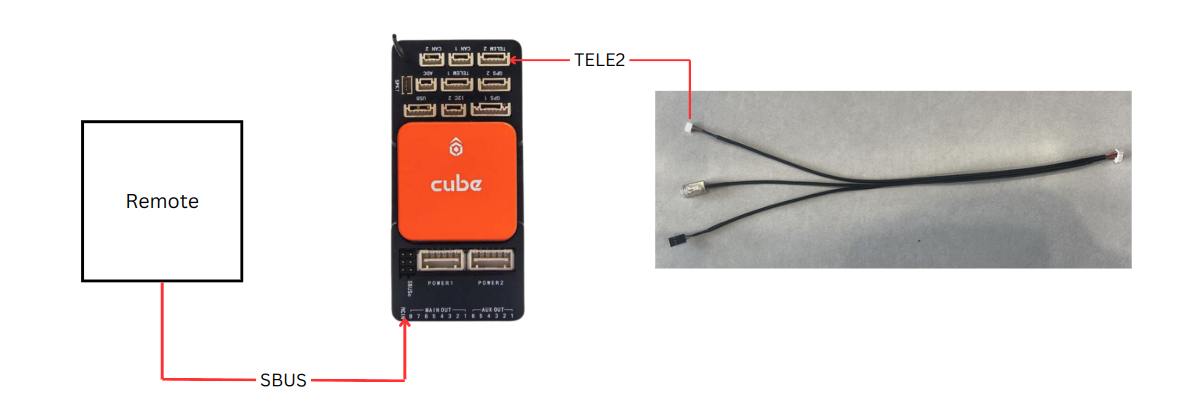
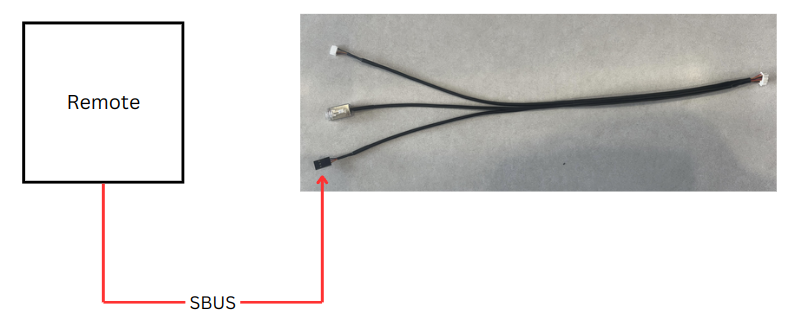
2.2 SBUS/PPM directly to gimbal
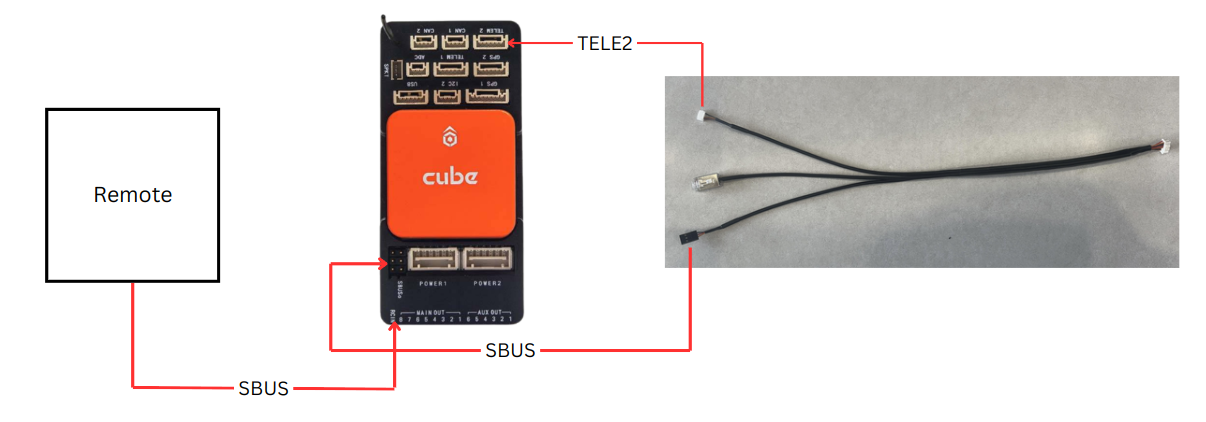
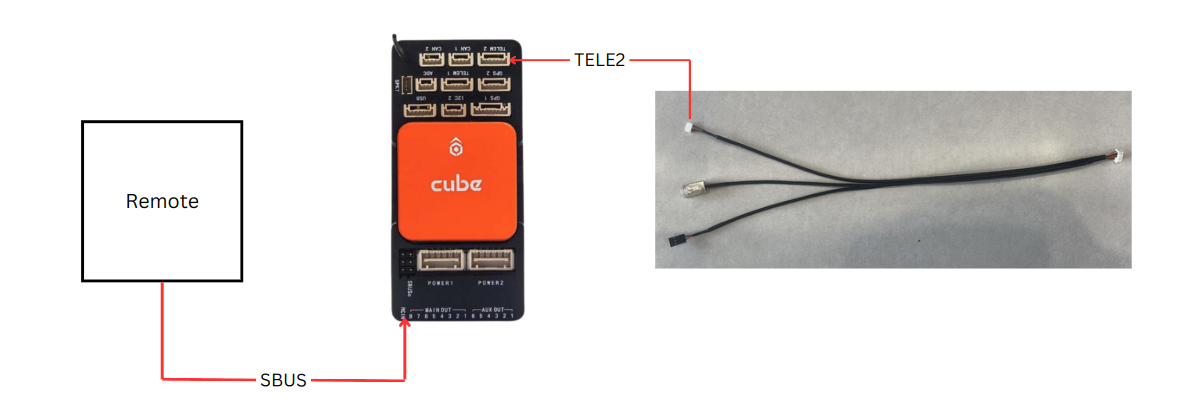
2.3 SBUS/PPM from Autopilot SBUS-OUT
2.4 Control by Autopilot RC-MAVlink convert
Last updated
Was this helpful?