
CONTROL MODE
There will be two different control mode based on the Mavlink protocol

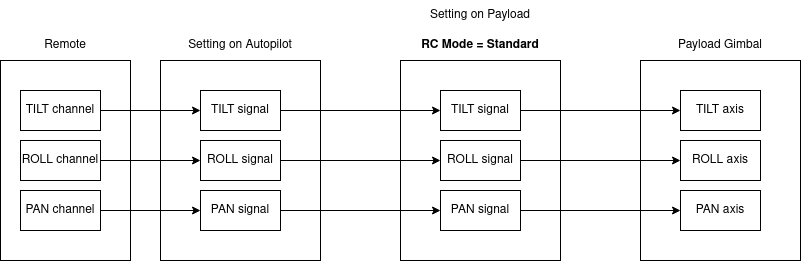
1. Standard RC Mode
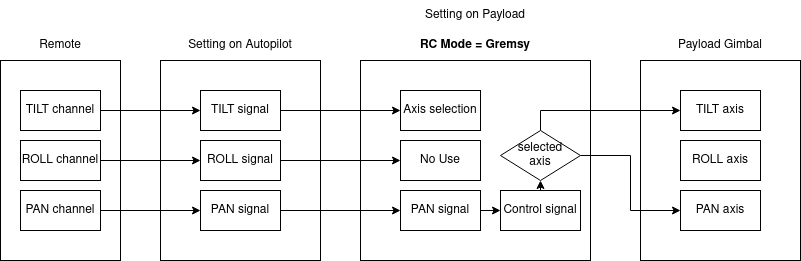
2. Gremsy RC Mode
Last updated
Was this helpful?