> For the complete documentation index, see [llms.txt](https://docs.gremsy.com/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://docs.gremsy.com/gimbals/aevo/gimbal-configuration/imu.md).
# IMU
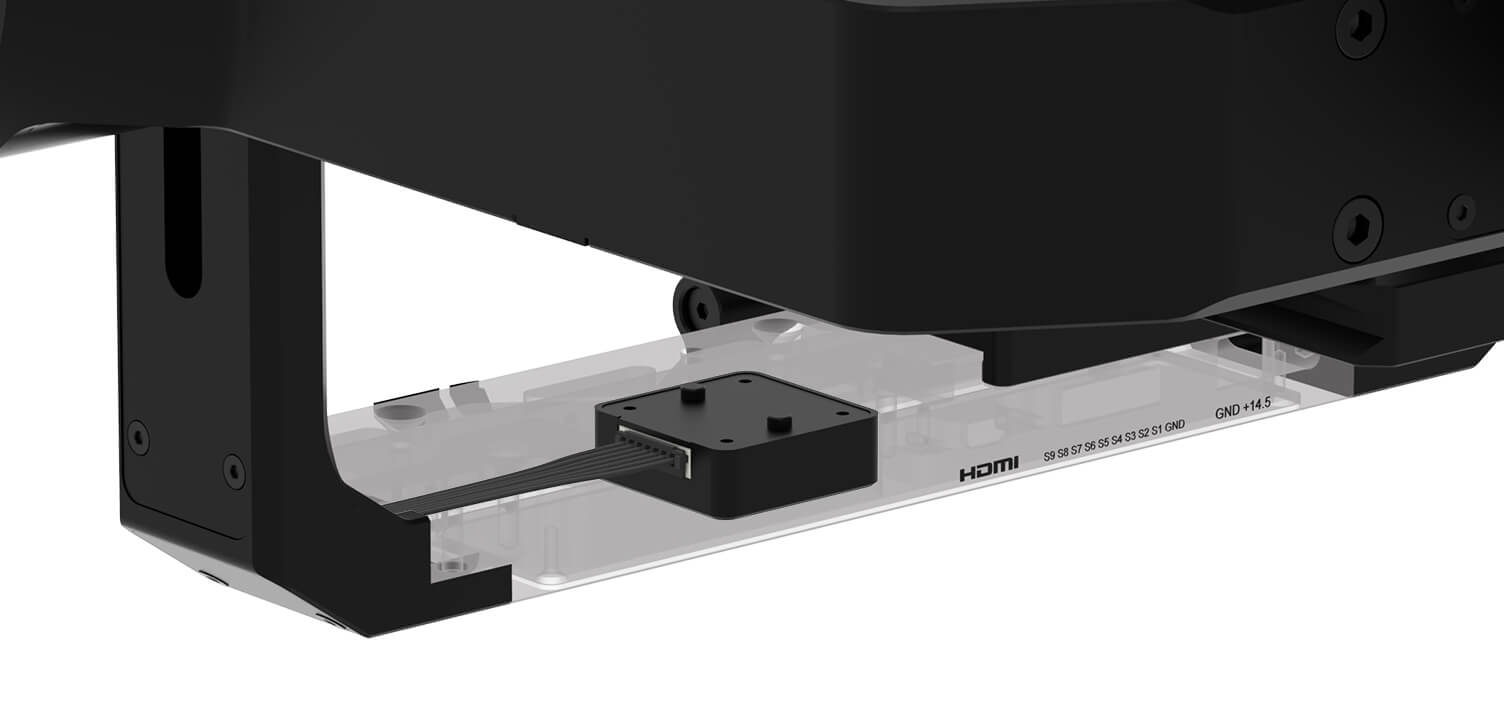
The IMU sensor used in the AEVO is a combination of a high precision 3 axis gyroscope sensor and a 3 axis accelerometer sensor.
IMU board is enclosed in a weather proof case and being heated where the temperature inside is controlled around 50°C with 0.2°C accuracy. Thanks to this feature, gyro calibration is no longer required in most situations.
In order to provide extra high precision data output, the IMU is performed 6-point calibration at Gremsy factory.
The AEVO controller has a special algorithm to provide attitude estimation based on input data from the IMU sensor. This attitude estimation helps the controller to command motor output to compensate for camera movement.
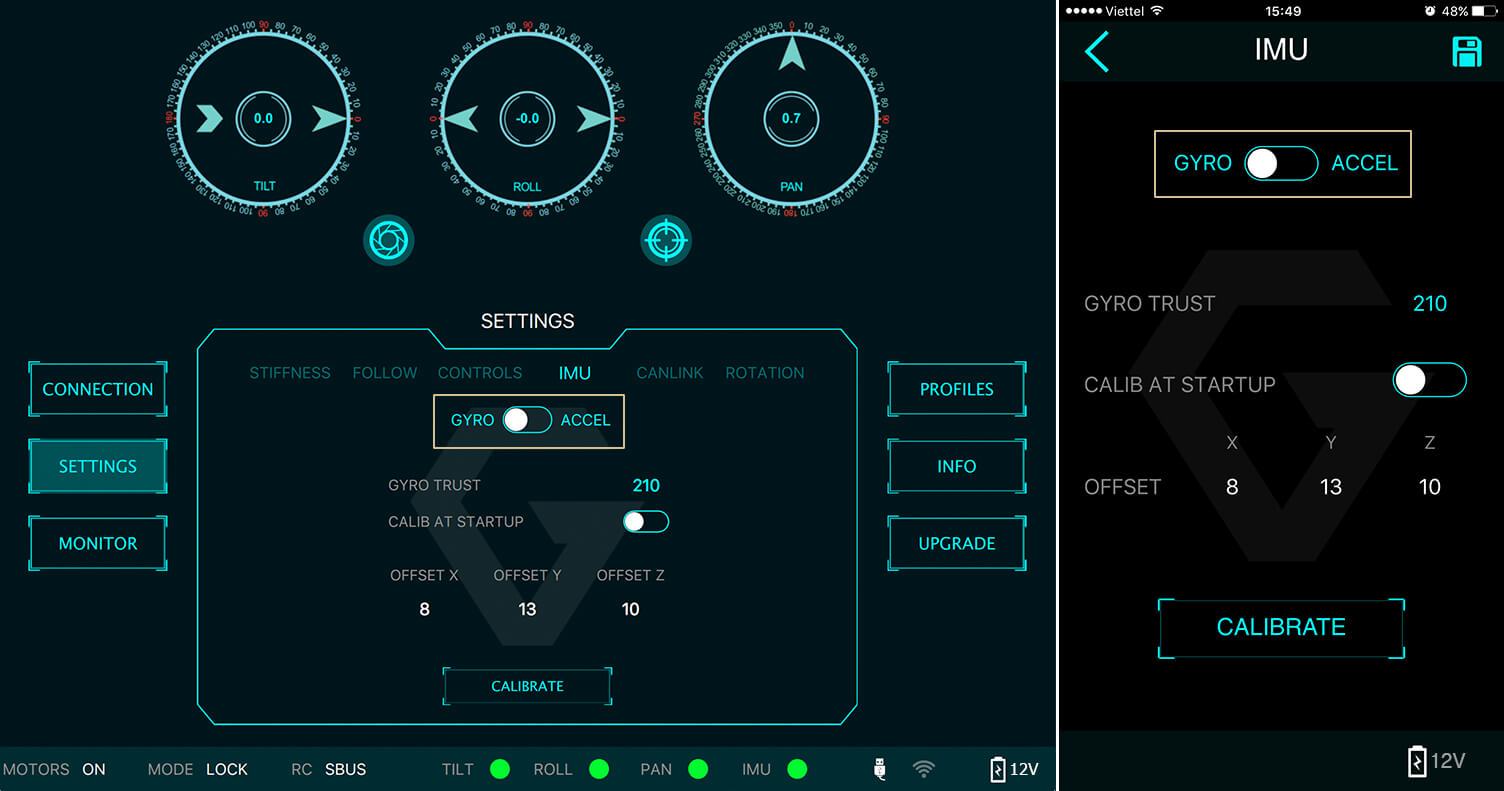
### GYPRO CALIBRATION
Thanks to temperature controlled and heated IMU, gyro calibration is not necessary as the gyro was calibrated at the factory and the temperature inside IMU remains constant around 50 degrees. However, if you notice drift during operation in extreme weather (below -20oC or above 50oC) please re-calibrate the gyro.
**CALIB AT STARTUP:** this feature is not necessary on the AEVO
After Gyro Calibration, Gyro Offset X, Y, Z will change to a new value depending on the temperature.
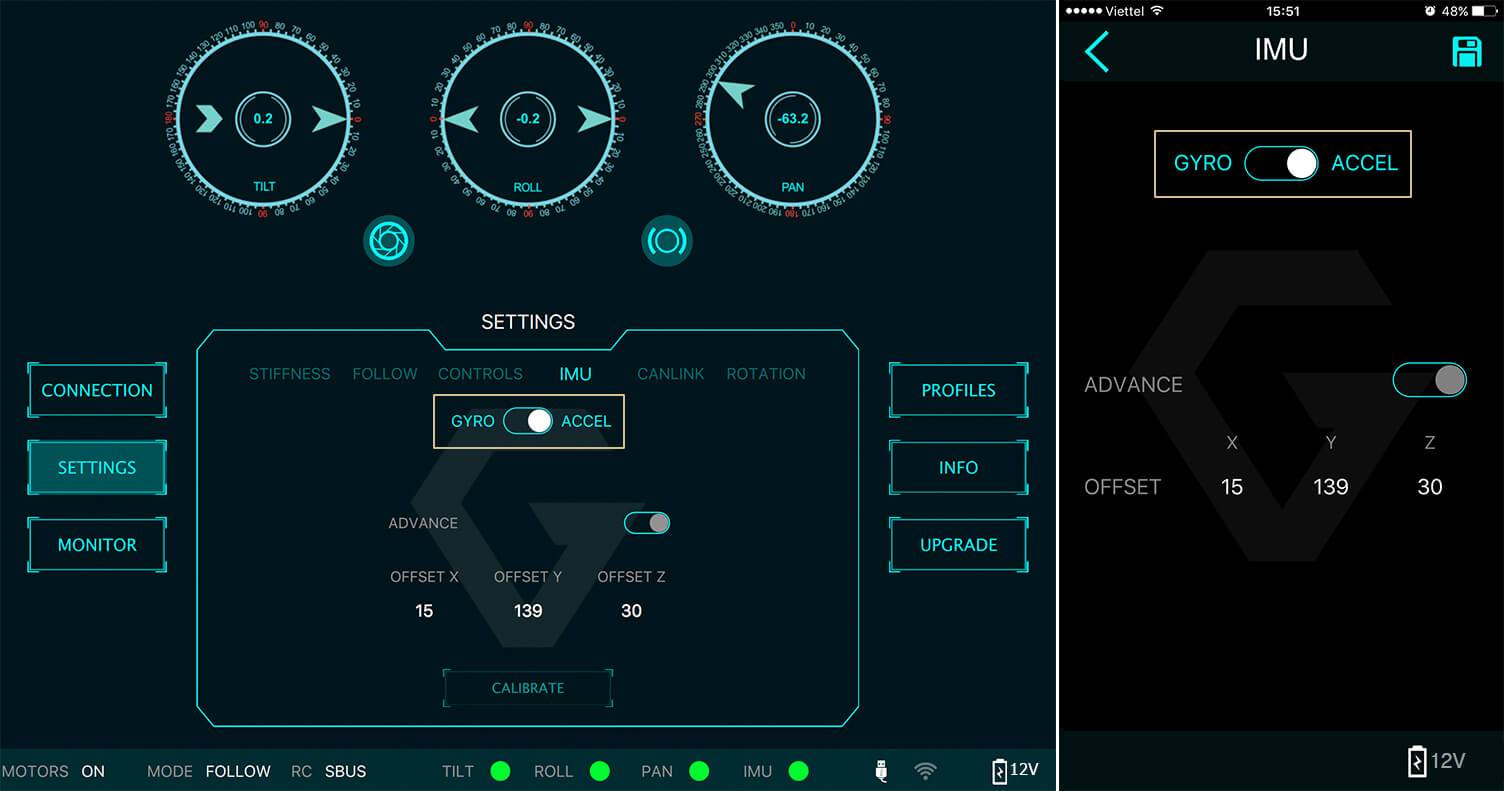
### ACCELEROMETTER CALIBRATION
Do not use this function, please contact Gremsy Support Engineers.\
The accelerometer sensor was calibrated properly at the factory to achieve an accurate horizon level with special and precise equipment. Users do not need to do this unless it’s required for troubleshooting.
---
# Agent Instructions
This documentation is published with GitBook. GitBook is the documentation platform designed so that both humans and AI agents can read, navigate, and reason over technical content effectively. Learn more at gitbook.com.
## Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter, and the optional `goal` query parameter:
```
GET https://docs.gremsy.com/gimbals/aevo/gimbal-configuration/imu.md?ask=&goal=
```
`ask` is the immediate question: it should be specific, self-contained, and written in natural language.
`goal` is optional and describes the broader end goal you are ultimately trying to accomplish on behalf of the user. GitBook uses it to tailor the answer towards what is most useful for that goal.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.